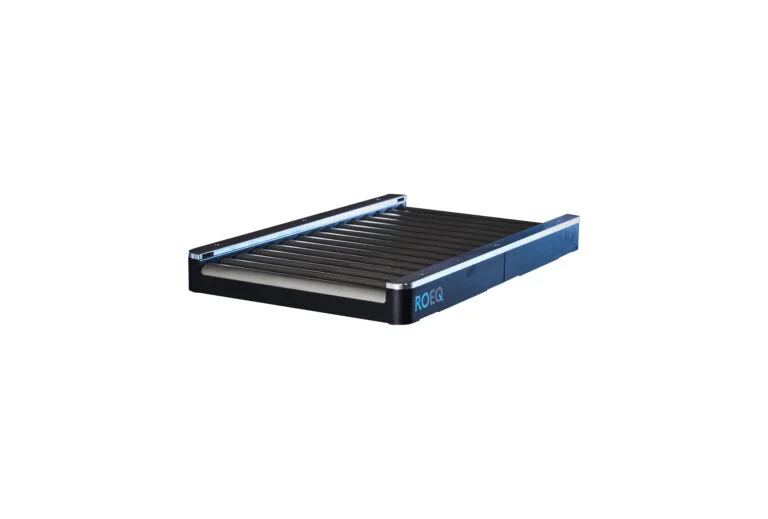
High payload enabling transportation of pallets and heavy goods
Robust design ensures a long lifetime and easy serviceability
IP52 - improved ability to withstand dust and fluids
Navigated smoothly and efficiently in dynamic environments
Designed based on present safety standards - ISO3691-4
The MiR1350 is the most powerful AMR from MiR to date. The MiR1350 is compliant with the highest available robot standards making it superior to other AMRs on the market.